Accueil > Cours > TD > Automatique > Asservissement > Correction en réaction
Correction en réaction
vendredi 11 mars 2005, par
On se propose dans cet exercice d’étudier l’effet d’une correction par une boucle interne de vitesse ?
L’asservissement de position étudié est modélisé par le schéma bloc suivant :
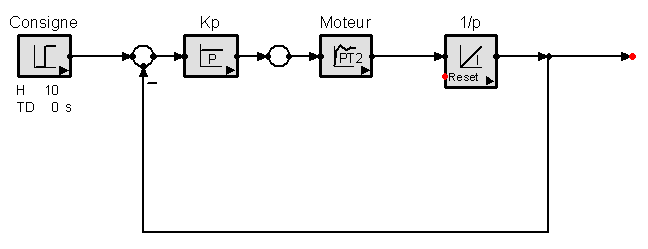
Le correcteur est un correcteur proportionnel de gain Kp
Le moteur est défini par la fonction de transfert :
 = \frac{{\Omega (p)}}{{U(p)}} = \frac{2}{{1 + 0,8*p + 0,25*p^2 }}")
– Déterminer graphiquement Kp
- pour que la marge de phase soit de 50° (KP=KP50)
- pour que le système soit juste instable (Kp=KPlim)
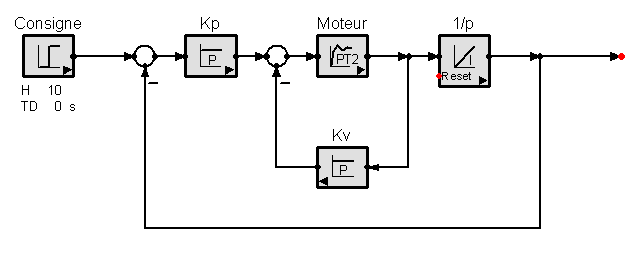
On installe maintenant une correction en réaction (boucle de vitesse), le schéma bloc devient :
– Tracer les diagrammes de Bode pour Kp=KPlim et Kv=1
- que devient la marge de phase ?
- quel est l’effet de la correction en réaction
Vos commentaires
# Le 22 novembre 2005 à 06:52 En réponse à : Correction en réaction
Puré je suis en Classe prépa et je peux vous dire que c trop dur les asservissements !! On comprend pas grand chose