Accueil > Cours > Cours > oldies - Mecanique > Statique > Principe Fondamental de la Statique (PFS)
Principe Fondamental de la Statique (PFS)
lundi 24 janvier 2005, par
Isolement d’un système matériel
Système matériel
On appelle système matériel un ensemble constitué de solides et de fluides que l’on souhaite étudier.
Système isolé
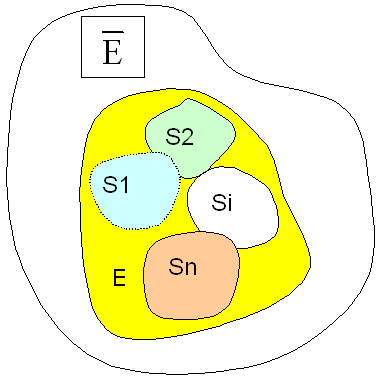
Un système isolé, est un système matériel que l’on rend distinct de son environnement. Le système isolé peut être une pièce mécanique, un ensemble de pièces, une partie de pièce, un fluide. L’isolement consiste à couper l’espace en deux parties disjointes afin de séparer, le système isole (E) de son environnement (![]() ).
).
Concepts d’efforts extérieurs et intérieurs ;
Efforts extérieurs ![]()
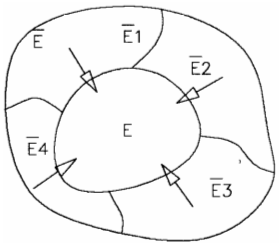
On appelle effort extérieur appliqué à un système matériel isolé, toutes les actions mécaniques agissant sur ce système, dont l’origine est à l’extérieur du système. Ces actions sont : soit des actions mécaniques de contact ; soit des actions à distances (gravité).
Efforts intérieurs ![]()
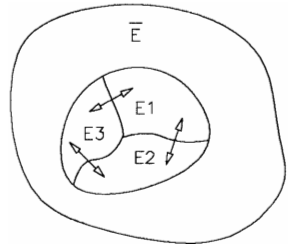
Les efforts intérieurs sont les efforts que s’exercent mutuellement les différentes parties du système isolé.
Remarque : La notion d’efforts extérieurs et intérieurs ne dépend que de la frontière du système isolé.
Principe fondamental de la statique.
Equilibre d’un solide ;
On dit qu’un solide est en équilibre par rapport à un repère entre deux dates t1 et t2 si tous les points du système isolé sont invariants dans R0.
(E) en équilibre ![]()
Equilibre d’un ensemble de solide ;
Pour qu’un système composé d’un ensemble de solides soit en équilibre, il faut et il suffit que :
il soit en équilibre à l’instant de l’étude ;
chacun des solides qui le composent soit en équilibre.
Principe fondamental de la statique ;
Enoncé
|Il existe au moins un repère Galiléen tel que pour tout ensemble matériel (E) en équilibre par rapport à ce repère, le torseur représentatif des actions extérieures qui lui sont appliquées est égal au torseur nul. ![]() |
|
soit en prenant en compte chaque action extérieure : ![]()
puis en écrivant chaque torseur au même point : 

Remarque : le principe fondamental de la statique n’est énoncé que dans un repère Galiléen, compte tenu des mécanismes étudiés et dans la mesure ou la durée de l’étude est courte, un repère lié à la terre est une bonne approximation d’un repère Galiléen. La notion de repère Galiléen sera développé dans le cours de Dynamique.
théorèmes généraux
Théorème de la résultante statique
Nous avons :![]() ou en décomposant
ou en décomposant 
Pour tout ensemble matériel (E) en équilibre par rapport à un repère Galiléen, la résultante du torseur représentatif des actions extérieures appliquées à (E) est un vecteur nul
Le théorème s’écrit : ![]() soit en décomposant
soit en décomposant 
Théorème du moment statique
Pour tout ensemble matériel (E) en équilibre par rapport à un repère Galiléen, le moment du torseur représentatif des actions extérieures appliquées à (E) est un vecteur nul .
Le théorème s’écrit : ![]() soit en décomposant
soit en décomposant 
Remarque :
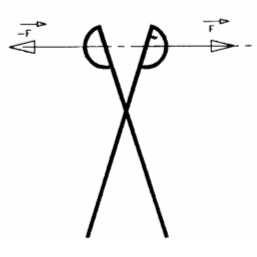
La condition ![]() appliquée à un ensemble de solides n’implique pas que l’ensemble est en équilibre. Ex : paire de ciseaux le torseur des actions mécaniques extérieures sur la paire de ciseaux est nul mais les ciseaux s’ouvrent.
appliquée à un ensemble de solides n’implique pas que l’ensemble est en équilibre. Ex : paire de ciseaux le torseur des actions mécaniques extérieures sur la paire de ciseaux est nul mais les ciseaux s’ouvrent.
Ecriture scalaire du principe fondamental de la Statique
Pour un solide en équilibre dans un repère R0 on a : ![]() ou en décomposant
ou en décomposant 
En faisant apparaître les coordonnées de chaque vecteurs on obtient

} } = \left\{ {\begin{array}{*{20}c} 0 & 0 \\ 0 & 0 \\ 0 & 0 \\\end{array}} \right\}_A") cette relation donne 6 équations scalaires
cette relation donne 6 équations scalaires 
Pour un ensemble de Np solides en équilibre il faut écrire : 6*Np équations scalaires pour étudier l’équilibre. Le choix judicieux des systèmes matériels isolés permet d’écrire des systèmes d’équations plus ou moins faciles à résoudre.
Théorème des actions réciproques.
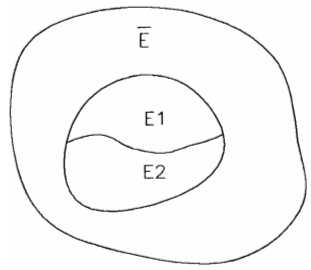
Soit un système matériel (E)composé de deux solides E=E1+E2.
Le (PFS) appliqué successivement à (E1), (E2) et (E) s’écrit :
– On isole E1
![]()
s‘écrit aussi en faisant apparaître le solide 2
![]()
a) ![]()
– On isole E2
![]()
s‘écrit aussi en faisant apparaître le solide 1
![]()
b) ![]()
– On isole E
![]()
s‘écrit aussi en faisant apparaître les solides 1 et 2
![]()
c) ![]()
(a)+(b)-(c)
on obtient
![]()
![]()
d’où le théorème des actions réciproques
L’action mécanique du système (E1) sur le système (E2) est opposée à l’action mécanique de (E2) sur (E,). : ![]()
Vos commentaires
# Le 5 avril 2005 à 08:09 En réponse à : > Principe Fondamental de la Statique (PFS)
hé la mise en page est sacrément nul mec
# Le 5 avril 2005 à 09:29, par papanicola robert En réponse à : > Principe Fondamental de la Statique (PFS)
Voila, la mise en page est corrigée
par contre je n’apprécie pas ta familiarité
si l’ensemble de mes cours ne te convient pas ne te connecte pas
# Le 28 juin 2005 à 17:34, par benjamin En réponse à : > Principe Fondamental de la Statique (PFS)
vous utiliser des termes trop complexes !!
# Le 29 juin 2005 à 10:26, par papanicola robert En réponse à : > Principe Fondamental de la Statique (PFS)
ce sont les bons
il est nécessaire de les maitriser en prépa
A+
# Le 2 août 2005 à 12:14 En réponse à : > Principe Fondamental de la Statique (PFS)
Je suis heureux de decouvrir ce site,
mais pour dire fanchement, je n’ai pas remarqué cette histoire de mise en page, car quand on cherche qque chose, on n’a pas le temps de faire ces remarques, ou vous venez corriger le contenu, ou vous vous taisez, ce serait mieux que de declencher des polémiques vides.
Je sais rester poli, et je vous demande des excuses, bon courage à Robert.
# Le 14 septembre 2005 à 21:34, par yorick En réponse à : > Principe Fondamental de la Statique (PFS)
bonjour,
j’apprécie bien ce cours mais disons
ke je voudrai bien ke vous fassiez
aussi des exos d’application.
je suis dans un lycée professionnel
et je suis en classe de 3em année
dessin bâtiment.
je souhaiterai bien ke vs répondiez
à mon méssage svp.
encore merci...
yorick .
# Le 25 septembre 2005 à 10:32 En réponse à : Apprentissage en prépa
Je commence juste les cours de statique en prépa et j’ai du mal. J’ai trouvé votre cours intéressant mais incomplet. Il n’est utile que à des personnes comprenant déjà tous les temres et les principes, donc que à des personnes connaissant déjà le cours.
# Le 25 septembre 2005 à 11:04, par papanicola robert En réponse à : Apprentissage en prépa
C’est effectivement un cours du type de celui que tu reçois avec ton prof.
l’interet est d’avoir une autre source documentaire.
# Le 2 décembre 2005 à 17:54 En réponse à : Principe Fondamental de la Statique (PFS)
Félicitations ! Je suis un éléve de PSI en pleine révisions de DS et je trouve que cet article et bien d’autres sont très bien faits. En effet, je trouve que ces articles "résument" très bien le cours et sont très pédagogiques.
Merci
# Le 2 décembre 2005 à 18:19, par papanicola robert En réponse à : Principe Fondamental de la Statique (PFS)
merci
# Le 10 décembre 2005 à 11:32, par étudiante En réponse à : Théormème des actions réciproques
Bonjour !
Je suis en prépa intégr et novice en mécanique, mais je trouve votre site très bien construit et compréhensible !
Par contre, il me semble qu’il y a une erreur dans l’écriture du torseur lors de l’isolement de E : les actions extérieures sont appliquées à la totalité du système E et non pas simplement à E2, non ?
# Le 4 février 2006 à 16:10, par Ghosty En réponse à : Principe Fondamental de la Statique (PFS)
bonjours, voila je prépare un BTS Assistance Technique d’Ingenieur et je suis à la recherche de cour détailler sur le PFD et le PFS, quelqu’un pourait t’il envoyer cela sur mon adresse mail SVP c’est tres urgent !!! merci
ghosty95@caramail.com
# Le 8 février 2006 à 18:37 En réponse à : > Principe Fondamental de la Statique (PFS)
merci pour ces cours je suis en terminal s si et vos cours m aide a comprendre quelque chose, c est clair precis c est cool !!
# Le 8 février 2006 à 18:39, par papanicola robert En réponse à : > Principe Fondamental de la Statique (PFS)
Merci
A l’année prochaine en PCSI
# Le 9 mars 2006 à 18:27, par ToM En réponse à : Principe Fondamental de la Statique (PFS)
Je suis élève en PTSI, je n’avais jamais fait de si avant, et je peux vous affirmer que tous vos cours me sont d’une très grande aide, ils sont clairs, facilement compréhensibles et bien présentés donc vraiment merci pour cette aide précieuse.
# Le 9 mars 2006 à 19:00, par papanicola robert En réponse à : Principe Fondamental de la Statique (PFS)
plus qu’a acheter le bouquin, tu auras la dernière version de mon cours et en plus les td avec les corrigés
Sciences-industrielles-en-PCSI
# Le 20 avril 2006 à 09:46, par GoopX En réponse à : Principe Fondamental de la Statique (PFS)
Bonjour, je travaille aujourd’hui dans la plasturgie et je souhaiterais renouer avec la méca.
En effet durant mon bac génie des matériaux, je dois avouer que je suis resté relativement imperméable à cette discipline. Mes
compétences de CAO et les applications bêtes et méchantes de formules m’ont sauvé à plusieurs reprises (ainsi qu’à l’exam d’ailleurs).
Puis ensuite j’ai enchainé en BTS plastu puis Diplome Universitaire Développement des nouveaux produits pour me dire qu’il est possible
que je reprenne des études un peu plus avancés (mais pas encore...). Bref, toujours est-il que j’aimerais reprendre la méca de 0.
J’ai bien relu ce complément mais je dois avouer que n’ayant plus mes cours de l’époque je n’arrive pas à tout suivre.
En gros je recherche aujourd’hui un site qui reprendrais les bases de cours (de classe de premiere n’ayons pas peur des mots).
merci d’avance...
# Le 23 novembre 2006 à 23:14 En réponse à : Principe Fondamental de la Statique (PFS)
Bonjour à vous !!
Je suis élève Ingénieur en Electromécanique-Electrotechnique-Froid et Climatisation et je trouve votre revue très intéressant.
Mais, il serait souhaitable que vous soyez un peu plus explicite sur certaines notions complexes pour les profanes qui n’ont, à mon avis, pas de base nécessaire pour vous suivre d’une manière exhaustive.
Je tiens à vous féliciter et de continuer dans cette perspective tout en apportant d’éventuelles inovations car la science sur le plan technique évolue exponentiellement.
Merci...
# Le 24 novembre 2006 à 07:45, par papanicola robert En réponse à : Principe Fondamental de la Statique (PFS)
merci
# Le 28 avril 2010 à 07:57, par Yaruna En réponse à : Principe Fondamental de la Statique (PFS)
i know that if i ask some freelance writers to do research on this theme, it would be really brilliant