Accueil > Cours > Cours > oldies - Mecanique > Cinematique > CIN3 - Cinématique du solide indéformable
CIN3 - Cinématique du solide indéformable
dimanche 22 août 2004, par
Solide indéformable
Mouvement d’un milieu continu par rapport à un référentiel. Champ des vecteurs vitesses ;

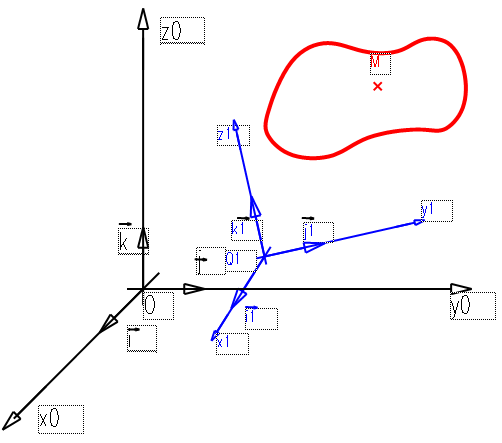
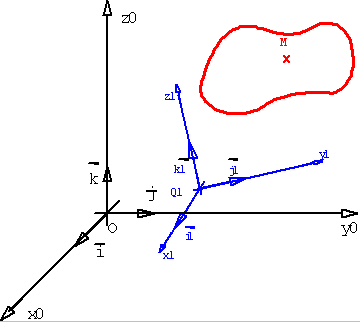
On considère le mouvement du solide S1 par rapport au repère R0. Chaque point M

S1 possède une vitesse par rapport à R0
L’ensemble des vecteurs vitesses

constitue le champ des vecteurs vitesses du solide S1/R0.
Chaque point M
S1 possède une accélération par rapport à R0. L’ensemble des vecteurs accélérations

constitue le champs des vecteurs accélérations de solide S1/R0.
Définition du solide indéformable, repères associés ;
Solide réel
Il est important de définir correctement la notion de solide et d’appréhender les limites du modèle représentant les solides réels.
Caractéristiques d’un solide réel :
Masse : constante mais érosion, usure, corrosion,...
Dimensions : constantes mais déformations locales de contact, élasticité du matériau
Evolution dans le temps : inconnue dans le temps.
Nous nous apercevons que le modèle que nous allons utiliser peut difficilement prendre en compte tous ces phénomènes.
Dans le cadre de la mécanique générale nous utiliserons le modèle du solide indéformable.
Solide indéformable
En mécanique générale, un corps solide est un ensemble de points matériels dont les distances mutuelles sont indépendantes du temps.

Le solide indéformable est un solide possédant une masse constante et un volume dont les limites sont invariantes quelles que soient les actions extérieures.
On associe au solide S1 un repère .R1 nous choisirons comme axe du repère des axes caractéristiques du solide (axe de symétrie, axe de rotation, support d’une translation,...)
Pour lire la suite, télécharger le fichier pdf...