Accueil > Labo de SI > Divers > Roue libre à cliquets
Roue libre à cliquets
samedi 18 mars 2006, par
Une roue libre placée entre un arbre et une roue permet d’entraîner la roue uniquement dans un seul sens, l’application typique est l’entrainement de la roue arrière d’un vélo.
– la roue doit être entrainée par le pédalier lorsque le cycliste pédale (suffisament vite)
– la roue ne doit pas entrainer le pédalier lors d’une descente
Animation
Fichiers Inventor - Motion Inventor
le Zip joint comprends les fichiers CAO de la roue libre sous Inventor et l’assemblage avec Motion Inventor 2004.
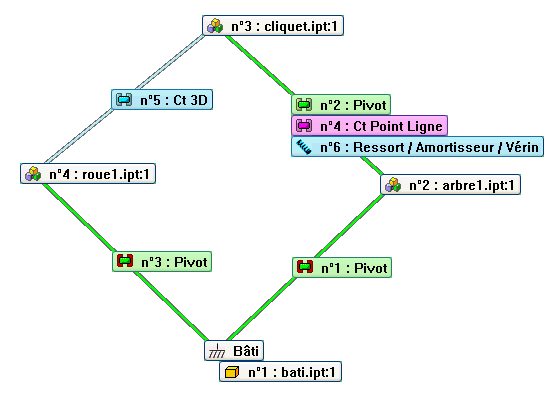
Particularités
– La liaison Cliquet-Roue est réalisée à l’aide d’une contact réel 3d
– la liaison Cliquet-Arbre est complétée par un contact point/plan pour éviter que le cliquet ne rentre dans l’arbre (un contact 3d reel aurait pris trop de temps de calcul)
– le ressort permet de maintenir le cliquer en contact avec la roue
**Paramètres de simulation
Voici les paramètres de simulations utilisés
- ressort ;
- longueur à vide : 10mm,
- raideur :

- amortissement : 0
- liaison pivot arbre/bati ;
- cette liaison est la liaison pilote,
- loi trapézoïdale adaptée

rampe cubique entre les niveaux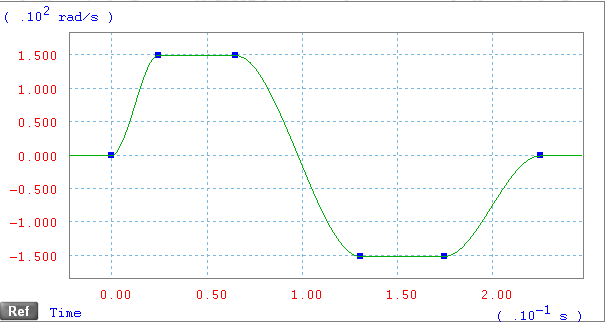
- liaison roue /bati.
- pour éviter que la roue ne continue à tourner par inertie, un couple résistant inversement proportionel à la vitesse est installé :

- pour éviter que la roue ne continue à tourner par inertie, un couple résistant inversement proportionel à la vitesse est installé :
Vos commentaires
# Le 15 mai 2006 à 13:00 En réponse à : Roue libre à cliquets
Bonjour,
serait-il possible d’avoir les paramètres de simulation (vitesse de rotation de l’arbre, caractéristiques du ressort...) ?
Merci d’avance.
# Le 15 mai 2006 à 13:10, par papanicola robert En réponse à : Roue libre à cliquets
tu dois pouvoir télécharger le modèle Motion
A+
# Le 16 mai 2006 à 12:46 En réponse à : Roue libre à cliquets
Bonjour,
Non, je ne peux pas ouvrir le fichier de simulation dans SolidWorks (CosmosMotion).
# Le 20 mai 2006 à 14:37, par papanicola robert En réponse à : Roue libre à cliquets
J’ai mis les paramètres de simulation dans le corps de l’article.
Est-ce suffisant ?